Cut Corn
Framework
What we have done:
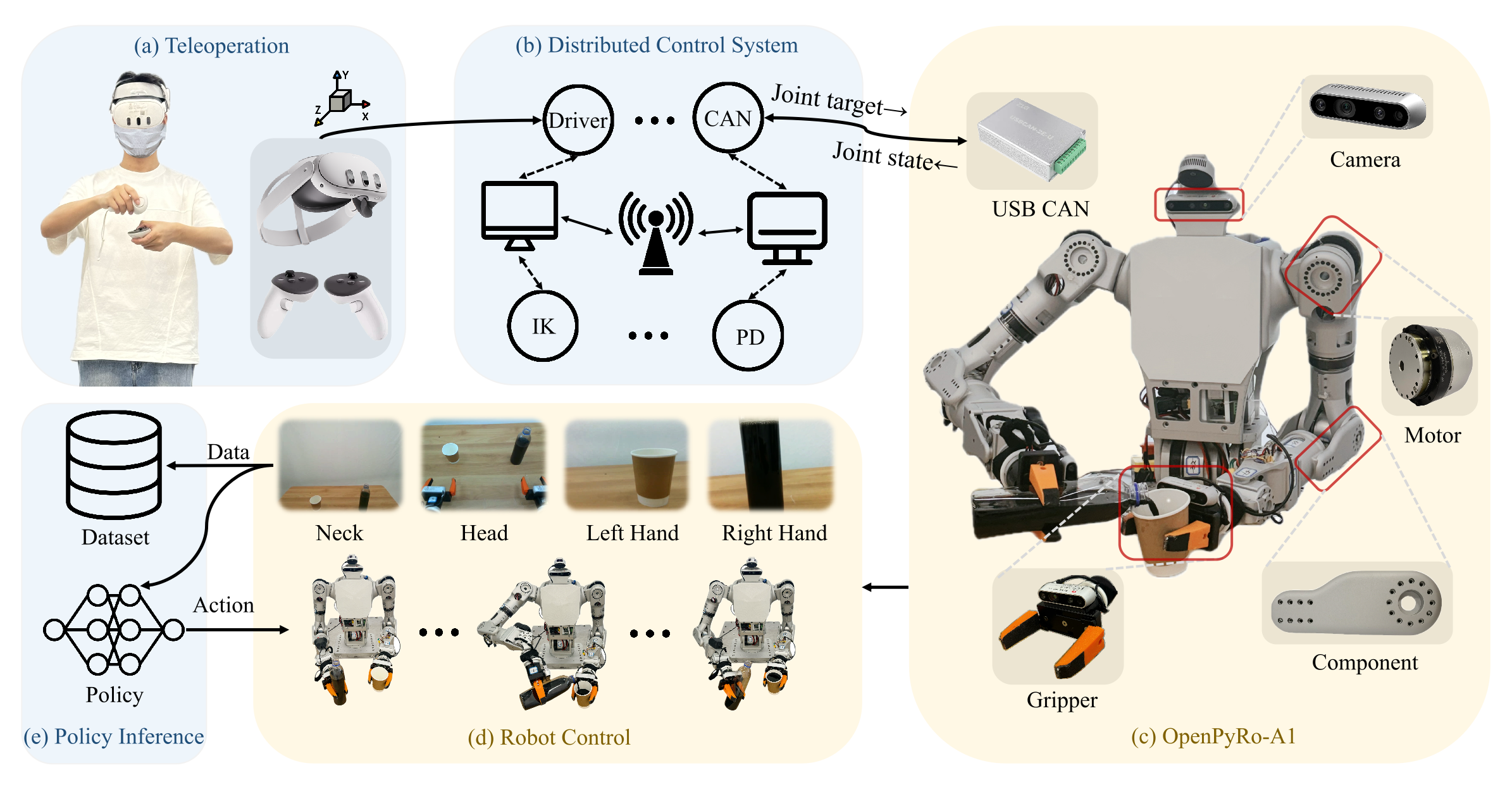
- OpenPyRo-A1: Developed a low-cost dual-arm humanoid robot.
- Distributed Framework: Built a Python-first control framework with VR teleoperation support.
- Bi-manual Dataset: Collected manipulation episodes for skill learning.
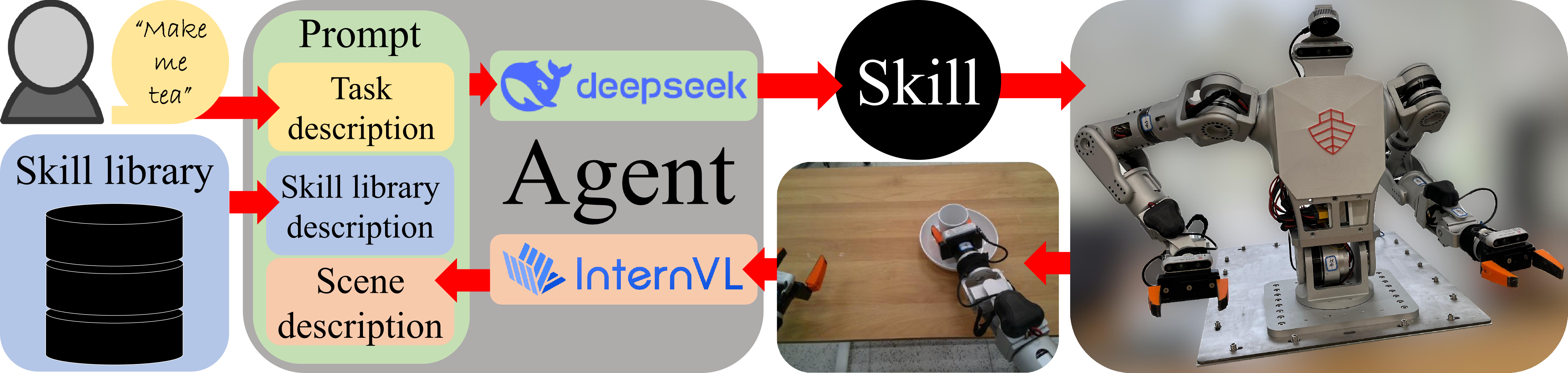
- Agentic Planning: Proposed a framework using large language and vision-language models.